Hybrider Antrieb für Zerspanroboter
Autor: Marcus Schönherr
ISBN: 978-3-95900-201-1
Dissertation, Leibniz Universität Hannover, 2018
Herausgeber der Reihe: Berend Denkena
Band-Nr.: IFW 07/2018
Umfang: 165 Seiten, 71 Abbildungen
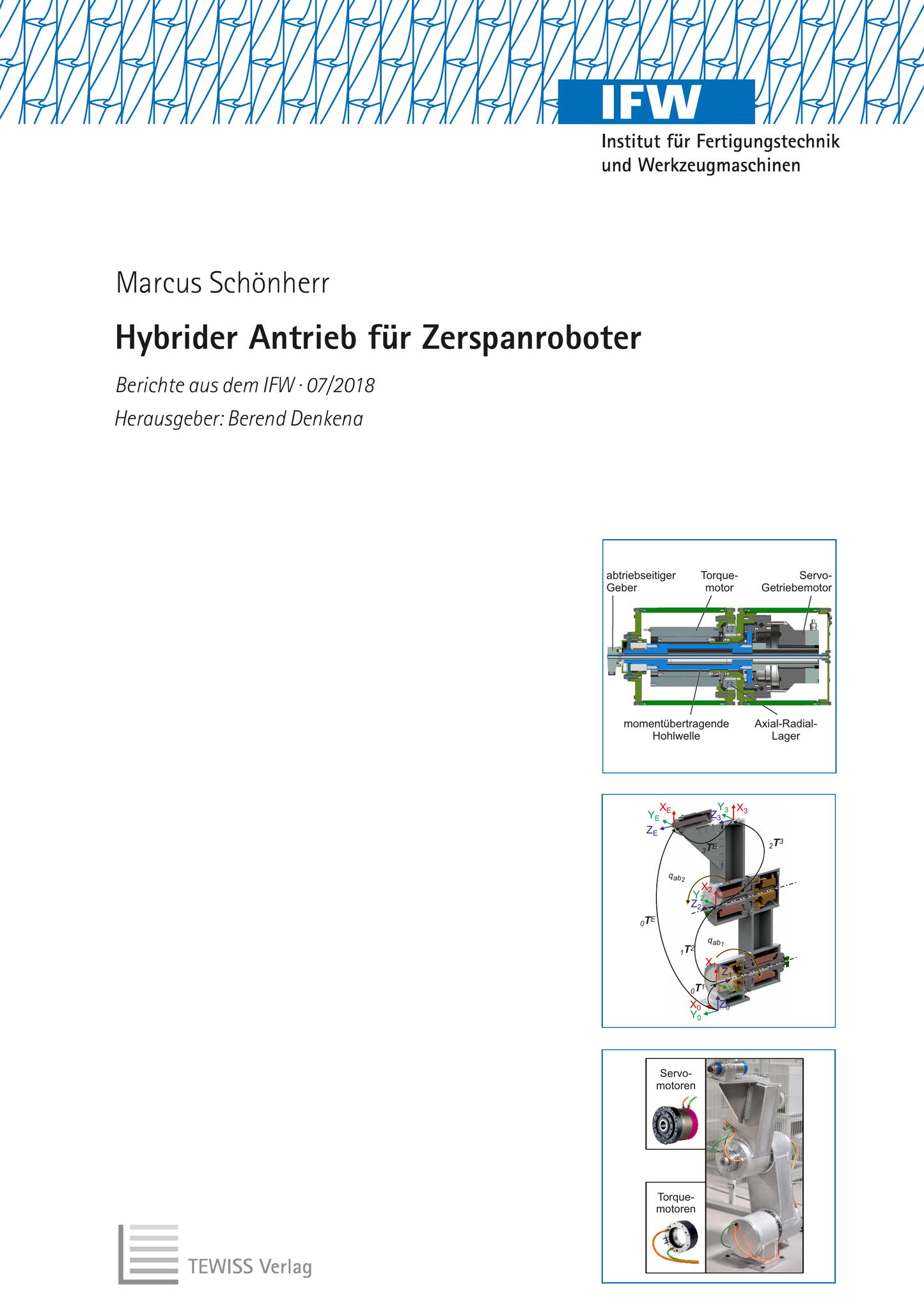
Schlagworte: Spanende Bearbeitung mit Robotern, Hybride Gelenkantriebe, Abtriebseitige Gelenkwinkelmessung
Kurzfassung: